





APM 2.6 und Pixhawk
Der ArduPilotMega, kurz APM, ist ein sehr flexibel einsetzbarer Open-Source-Autopilot, der auf dem Arduino-Microcontroller basiert; die Entwicklung dieses Systems wird von 3D Robotics (3DR) vorangetrieben, und von jeder Version sowie den Zubehörmodulen gibt es zahlreiche Varianten und Klone. Der APM 2.6 erschien bereits 2012 und arbeitet mit 8 Bit. Seit 2013 gibt es das 32 Bit-Nachfolgemodell Pixhawk, auch davon gibt es mittlerweile verschiedene Klone und Derivate. APM und Pixhawk können eine Vielzahl von Modellen steuern, das hängt nur von der jeweiligen Firmware ab, die beständig weiterentwickelt wird. Die wichtigsten Varianten sind APM:Copter (ArduCopter) für Multicopter, APM:Plane (ArduPlane) für Flächenmodelle und APM:Rover (ArduRover) für Fahrzeuge und Boote. Der Autopilot kann u. a. Wegpunkte abfliegen / abfahren, unterstützt automatische Rückkehr zum Startpunkt (RTH = return to home), verschiedene Arten der Fluglagestabilisierung und vieles mehr. Fest eingebaut sind Bewegungssensoren (Gyro / Akzelerometer) sowie ein barometrischer Höhenmesser. Es gibt zahlreiche externe Module, am wichtigsten GPS/Kompass, außerdem ein Data Radio zur Kommunikation mit der Kontrollsoftware am Boden, OSD zur Telemetrie-Einblendung beim FPV-Einsatz, Airspeed-Sensor, Sonar, Optical Flow Sensor und einiges mehr.
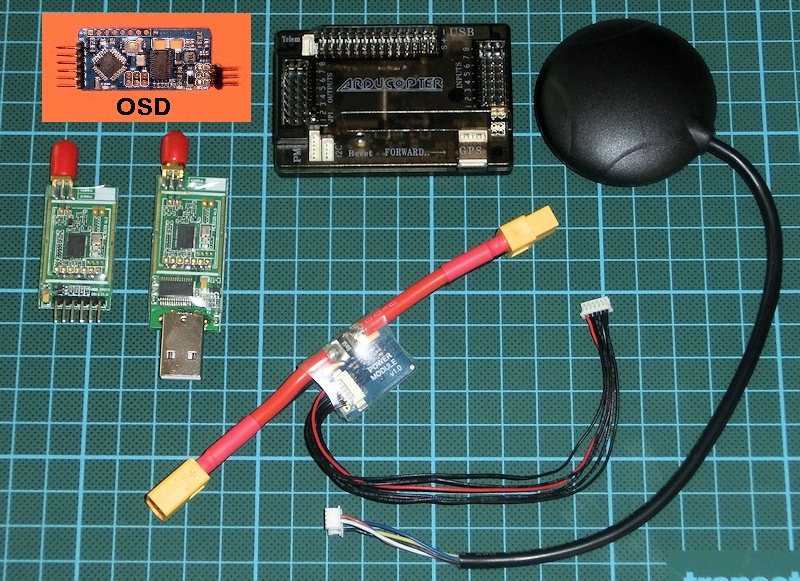
Hier der APM 2.6, GPS/Kompass (in der schwarzen Scheibe), Powermodul (zur Versorgung des Autopilot und Messung von Strom/Spannung), OSD (ein Klon des minimOSD von 3DR), sowie zwei Data Radio-Module (eines im Modell, das andere am Computer der Bodenstation, hier die 433MHz-Versionen, im Bild ohne Antennen):
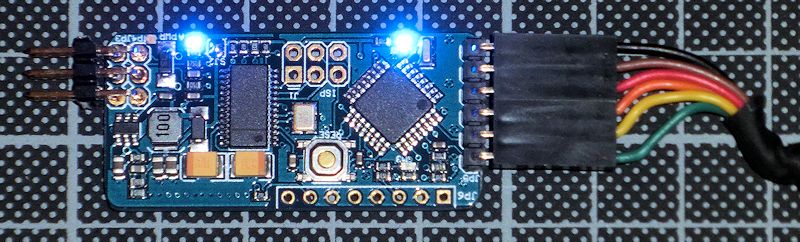
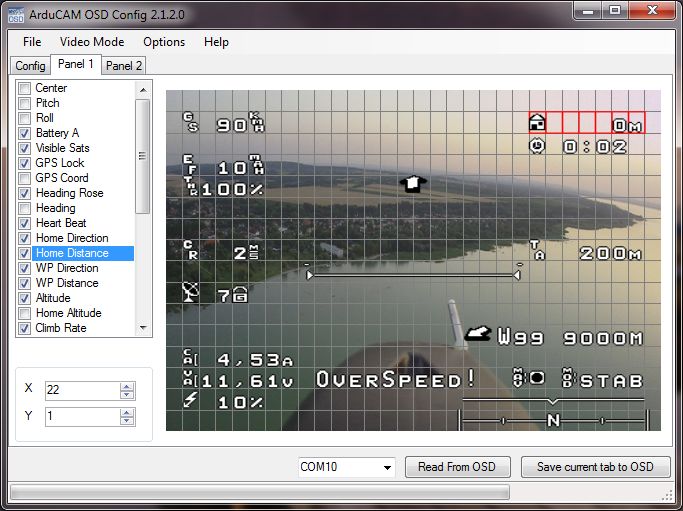
Hier eine Nahaufnahme des OSD, darunter ein Screenshot des Konfigurationstools. Damit kann man die anzuzeigenden Parameter auswählen und beliebig auf dem Videobild positionieren. Es können zwei verschiedene Konfigurationen (sog. Panels) angelegt werden, zwischen denen beim Flug jederzeit umgeschaltet werden kann.
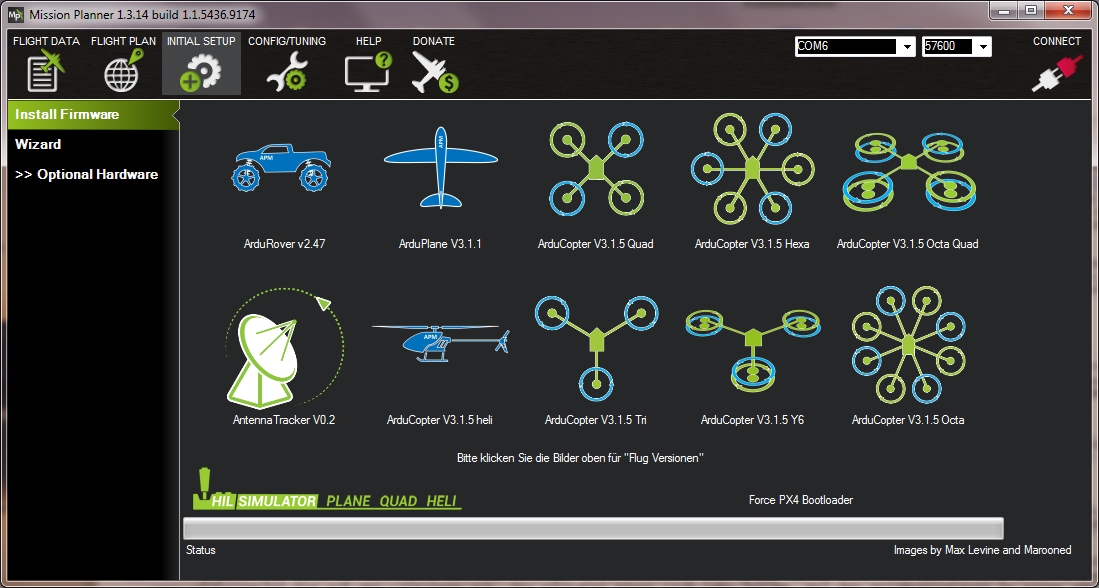
Gesteuert und konfiguriert werden APM und Pixhawk meist mit der Software Mission Planner, hier sieht man das Auswahlmenü der verschiedenen Firmware-Varianten (je nach geplantem Einsatz des Autopiloten):
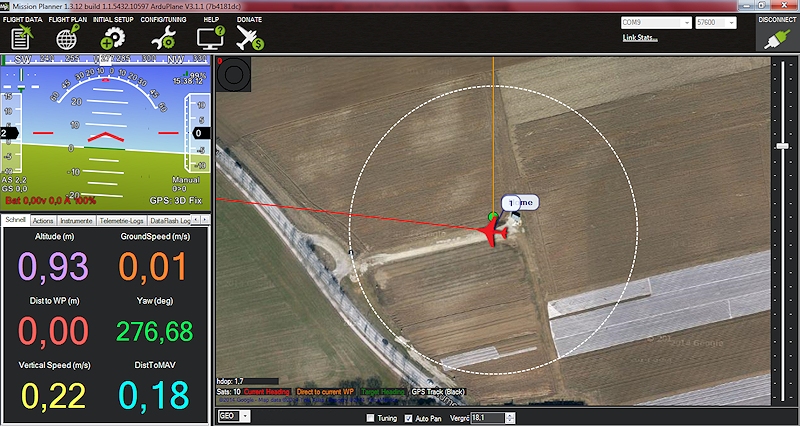
Im Mission Planner kann man bei bestehender Verbindung über Data Radio die Position des Modells auf der Karte sehen, außerdem zahlreiche Telemetriedaten. Logfiles mit Telemetrieparametern sowie dem geflogenen / gefahrenen Kurs werden aufgezeichnet, es sind viele grafische und tabellarische Auswertungen möglich; das untere Bild zeigt beispielsweise eine 3D-Darstellung der Flugstrecke.

Andere Programme zur Live-Kontrolle von APM und Pixhawk sind der APM Planner (auch für Apple) sowie die Apps Droidplanner, Droidplanner 2, Tower (Droidplanner 3) und Andropilot für Android. Das folgende Bild zeigt ein 7 Zoll-Android-Tablet, auf dem Droidplanner läuft. Angeschlossen ist hier das 3DR Data Radio V2; wichtig: das Tablet muss OTG-fähig ("on the go") sein, damit ein Telemetrie-Set am USB-Anschluss funktioniert.
